ロボットカー制御
ここではロボットカーキットの組み立てと、Android端末から走行の制御をしてみたいと思います。
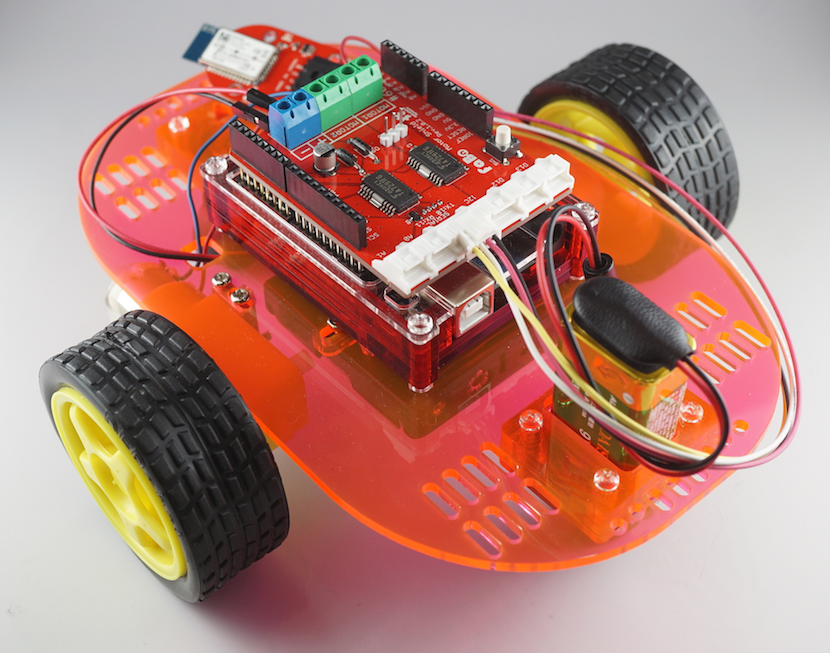
ロボットカー組み立て
ロボットカーの組み立て方法、および配線はこちらをご参照下さい。
https://sites.google.com/a/gclue.jp/roboka-zuo-cheng/home
使用するシールド
今回はFaBoのモーターシールドを使用します。
使用方法はこちらをご参照下さい。
モーターシールド
https://fabo.gitbooks.io/module/content/shield_motor/shield_motor.html
使用するBrick
Bluetooth
https://fabo.gitbooks.io/module/content/brick_serial_bluetooth/brick_serial_bluetooth.html
Arduino
Arduino側では、Android端末から受信したデータにより前進、後退、停止するプログラムを書きます。
#include <SoftwareSerial.h>
#define led1 A0 // A0番ピンにてLEDを制御
#define led2 A1 // A1番ピンにてLEDを制御
#define right_f 4 // 右タイヤのモーター前進用ピン
#define right_pow 3 // 右タイヤのモーター出力設定用ピン
#define right_b 2 // 右タイヤのモーター後退用ピン
#define left_f 5 // 左タイヤのモーター用ピン(前進用)
#define left_pow 6 // 左タイヤのモーター出力設定用ピン
#define left_b 7 // 左タイヤのモーター用ピン(後退用)
SoftwareSerial android(12, 13); // Bluetooth用シリアル通信ピン
char readData = 0; // androidからのテキスト取得用
void setup() {
// 右側のタイヤ制御用
pinMode(right_f, OUTPUT);
pinMode(right_b, OUTPUT);
pinMode(right_pow, OUTPUT);
// 左側のタイヤ制御用
pinMode(left_f, OUTPUT);
pinMode(left_b, OUTPUT);
pinMode(left_pow, OUTPUT);
// Bluetooth用のシリアルのポートを設定
android.begin(115200);
// arduinoのシリアルモニタ用
Serial.begin(9600);
Serial.println("start");
}
void loop() {
if (android.available()) {
// Androidからデータ受信
readData = android.read();
Serial.write(readData);
Serial.write(10);
// 受信データによりロボカーの制御を行う
// 前進
if (readData == '1') {
// 右タイヤ前進(H/L)
digitalWrite(right_f, HIGH);
digitalWrite(right_b, LOW);
analogWrite(right_pow, 255); // 0-255 強さ
// 左タイヤ前進(H/L)
digitalWrite(left_f, HIGH);
digitalWrite(left_b, LOW);
analogWrite(left_pow, 255); // 0-255 強さ
}
// 後退
else if ( readData == '2') {
// 右タイヤ後退(L/H)
digitalWrite(right_f, LOW);
digitalWrite(right_b, HIGH);
analogWrite(right_pow, 255); // 0-255 強さ
// 左タイヤ後退(L/H)
digitalWrite(left_f, LOW);
digitalWrite(left_b, HIGH);
analogWrite(left_pow, 255); // 0-255 強さ
}
// 停止
else {
// 右タイヤ停止(L/L)
digitalWrite(right_f, LOW);
digitalWrite(right_b, LOW);
analogWrite(right_pow, 0); // 0-255 強さ
// 左タイヤ後退(L/L)
digitalWrite(left_f, LOW);
digitalWrite(left_b, LOW);
analogWrite(left_pow, 0); // 0-255 強さ
}
}
}
Android
Bluetooth認識設定
Bluetoothの認識設定を行います。
[app]>[src]>[main]>[res]内のAndroidManifest.xmlを開き、下記の内容を追加します。
<uses-permission android:name="android.permission.BLUETOOTH" />
<uses-permission android:name="android.permission.BLUETOOTH_ADMIN" />
AndroidManifest.xml
変更後はこのような状態になります。
<?xml version="1.0" encoding="utf-8"?>
<manifest xmlns:android="http://schemas.android.com/apk/res/android"
package="gclue.com.mybluetooth" >
<uses-permission android:name="android.permission.BLUETOOTH" />
<uses-permission android:name="android.permission.BLUETOOTH_ADMIN" />
<application
android:allowBackup="true"
android:icon="@drawable/ic_launcher"
android:label="@string/app_name"
android:theme="@style/AppTheme" >
<activity
android:name=".MainActivity"
android:label="@string/app_name" >
<intent-filter>
<action android:name="android.intent.action.MAIN" />
<category android:name="android.intent.category.LAUNCHER" />
</intent-filter>
</activity>
</application>
</manifest>
画面レイアウト
ロボカー操作用に↑ボタン、Stopボタン、↓ボタンを配置します。
activity_main.xml
<?xml version="1.0" encoding="utf-8"?>
<LinearLayout xmlns:android="http://schemas.android.com/apk/res/android"
android:layout_width="fill_parent"
android:layout_height="fill_parent"
android:orientation="vertical" >
<Button android:id="@+id/connectButton"
android:layout_width="fill_parent"
android:layout_height="wrap_content"
android:text="Connect" />
<TextView
android:id="@+id/statusValue"
android:layout_width="fill_parent"
android:layout_height="wrap_content"
/>
<TextView
android:id="@+id/inputValue"
android:layout_width="fill_parent"
android:layout_height="wrap_content"
/>
<Button android:id="@+id/forwardButton"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:layout_gravity="center_horizontal"
android:text="↑" />
<Button android:id="@+id/stopButton"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:layout_gravity="center_horizontal"
android:text="stop" />
<Button android:id="@+id/backButton"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:layout_gravity="center_horizontal"
android:text="↓" />
</LinearLayout>
次にメインの処理を作成します。
MainActivity.java
package sample.robo;
import android.bluetooth.BluetoothAdapter;
import android.bluetooth.BluetoothDevice;
import android.bluetooth.BluetoothSocket;
import android.os.Bundle;
import android.os.Handler;
import android.os.Message;
//import android.support.v7.app.ActionBarActivity;
import android.support.v7.app.AppCompatActivity;
import android.util.Log;
import android.view.View;
import android.widget.Button;
import android.widget.TextView;
import java.io.IOException;
import java.io.InputStream;
import java.io.OutputStream;
import java.util.Set;
import java.util.UUID;
//public class MainActivity extends ActionBarActivity implements Runnable, View.OnClickListener {
public class MainActivity extends AppCompatActivity implements Runnable, View.OnClickListener {
/* tag */
private static final String TAG = "BluetoothSample";
/* Bluetooth Adapter */
private BluetoothAdapter mAdapter;
/* Bluetoothデバイス */
private BluetoothDevice mDevice;
/* Bluetooth UUID (固定)*/
private final UUID MY_UUID = UUID.fromString("00001101-0000-1000-8000-00805F9B34FB");
/* デバイス名 環境に合ったものに変更*/
private final String DEVICE_NAME = "RNBT-71EE";
/* Soket */
private BluetoothSocket mSocket;
/* Thread */
private Thread mThread;
/* Threadの状態を表す */
private boolean isRunning;
/** 接続ボタン. */
private Button connectButton;
/** 前進ボタン. */
private Button forwardButton;
/** 後退ボタン. */
private Button backButton;
/** STOPボタン. */
private Button stopButton;
/** ステータス. */
private TextView mStatusTextView;
/** Bluetoothから受信した値. */
private TextView mInputTextView;
/** Action(ステータス表示). */
private static final int VIEW_STATUS = 0;
/** Action(取得文字列). */
private static final int VIEW_INPUT = 1;
/** BluetoothのOutputStream. */
OutputStream mmOutputStream = null;
/** Connect状態確認用フラグ. */
private boolean connectFlg = false;
@Override
public void onCreate(Bundle savedInstanceState){
super.onCreate(savedInstanceState);
// Layoutにて設定したビューを表示
setContentView(R.layout.activity_main);
// TextViewの設定(Layoutにて設定したものを関連付け)
mInputTextView = (TextView)findViewById(R.id.inputValue);
mStatusTextView = (TextView)findViewById(R.id.statusValue);
// Buttonの設定(Layoutにて設定したものを関連付け)
connectButton = (Button)findViewById(R.id.connectButton);
forwardButton = (Button)findViewById(R.id.forwardButton);
backButton = (Button)findViewById(R.id.backButton);
stopButton = (Button)findViewById(R.id.stopButton);
// ボタンのイベント設定
connectButton.setOnClickListener(this);
forwardButton.setOnClickListener(this);
backButton.setOnClickListener(this);
stopButton.setOnClickListener(this);
// Bluetoothのデバイス名を取得
// デバイス名は、RNBT-XXXXになるため、
// DVICE_NAMEでデバイス名を定義
mAdapter = BluetoothAdapter.getDefaultAdapter();
mStatusTextView.setText("SearchDevice");
Set< BluetoothDevice > devices = mAdapter.getBondedDevices();
for ( BluetoothDevice device : devices){
if(device.getName().equals(DEVICE_NAME)){
mStatusTextView.setText("find: " + device.getName());
mDevice = device;
}
}
}
// 別のアクティビティが起動した場合の処理
@Override
protected void onPause(){
super.onPause();
isRunning = false;
connectFlg = false;
try{
mSocket.close();
}
catch(Exception e){}
}
// スレッド処理(connectボタン押下後に実行)
@Override
public void run() {
InputStream mmInStream = null;
Message valueMsg = new Message();
valueMsg.what = VIEW_STATUS;
valueMsg.obj = "connecting...";
mHandler.sendMessage(valueMsg);
try{
// 取得したデバイス名を使ってBluetoothでSocket接続
mSocket = mDevice.createRfcommSocketToServiceRecord(MY_UUID);
mSocket.connect();
mmInStream = mSocket.getInputStream();
mmOutputStream = mSocket.getOutputStream();
// InputStreamのバッファを格納
byte[] buffer = new byte[1024];
// 取得したバッファのサイズを格納
int bytes;
valueMsg = new Message();
valueMsg.what = VIEW_STATUS;
valueMsg.obj = "connected.";
mHandler.sendMessage(valueMsg);
connectFlg = true;
while(isRunning){
// InputStreamの読み込み
bytes = mmInStream.read(buffer);
Log.i(TAG,"bytes="+bytes);
// String型に変換
String readMsg = new String(buffer, 0, bytes);
// null以外なら表示
if(readMsg.trim() != null && !readMsg.trim().equals("")){
Log.i(TAG,"value="+readMsg.trim());
valueMsg = new Message();
valueMsg.what = VIEW_INPUT;
valueMsg.obj = readMsg;
mHandler.sendMessage(valueMsg);
}
}
}
// エラー処理
catch(Exception e){
valueMsg = new Message();
valueMsg.what = VIEW_STATUS;
valueMsg.obj = "Error1:" + e;
mHandler.sendMessage(valueMsg);
try{
mSocket.close();
}catch(Exception ee){}
isRunning = false;
connectFlg = false;
}
}
// ボタン押下時の処理
@Override
public void onClick(View v) {
// Connectボタン
if(v.equals(connectButton)) {
if(!connectFlg) {
mStatusTextView.setText("try connect");
mThread = new Thread(this);
// Threadを起動し、Bluetooth接続
isRunning = true;
mThread.start();
}
}
// ↑ボタン
else if(v.equals(forwardButton)) {
if(connectFlg) {
try {
// ↑ボタン押下時、'1'を送信
mmOutputStream.write("1".getBytes());
// 画面上に'↑:'を表示
mStatusTextView.setText("↑:");
} catch (IOException e) {
Message valueMsg = new Message();
valueMsg.what = VIEW_STATUS;
valueMsg.obj = "Error1:" + e;
mHandler.sendMessage(valueMsg);
}
}
// Connectボタンにより接続されていない場合
else {
mStatusTextView.setText("Please push the connect button");
}
}
// ↓ボタン
else if(v.equals(backButton)) {
if(connectFlg) {
try {
// ↓ボタン押下時、'2'を送信
mmOutputStream.write("2".getBytes());
// 画面上に'↓:'を表示
mStatusTextView.setText("↓:");
} catch (IOException e) {
Message valueMsg = new Message();
valueMsg.what = VIEW_STATUS;
valueMsg.obj = "Error2:" + e;
mHandler.sendMessage(valueMsg);
}
}
// Connectボタンにより接続されていない場合
else {
mStatusTextView.setText("Please push the connect button");
}
}
// stopボタン
else if(v.equals(stopButton)) {
if(connectFlg) {
try {
// stopボタン押下時、'0'を送信
mmOutputStream.write("0".getBytes());
// 画面上に'STOP:'を表示
mStatusTextView.setText("STOP:");
} catch (IOException e) {
Message valueMsg = new Message();
valueMsg.what = VIEW_STATUS;
valueMsg.obj = "Error5:" + e;
mHandler.sendMessage(valueMsg);
}
}
// Connectボタンにより接続されていない場合
else {
mStatusTextView.setText("Please push the connect button");
}
}
}
/**
* 描画処理はHandlerでおこなう
*/
Handler mHandler = new Handler() {
@Override
public void handleMessage(Message msg) {
int action = msg.what;
String msgStr = (String)msg.obj;
if(action == VIEW_INPUT){
mInputTextView.setText(msgStr);
}
else if(action == VIEW_STATUS){
mStatusTextView.setText(msgStr);
}
}
};
}
これでプログラムは完了です。
まず、ロボットカーに単三電池4本(モーター用)、9V電池(Arduino電源用)を接続します。
AndroidとBluetooth接続し、画面のボタンからロボットカーを操作してみてください。
ここまで出来ましたら以下の内容を試してみましょう。
1.右旋回、左旋回機能を追加
2.速度変更
3.センサーを接続し、取得した値をAndroid端末に送信
4.センサーの値により動作変更(暗くなったら遅くなるなど)