シリアル通信
関連レジスタ
| 番地 | 定数名 | 概要 |
|---|---|---|
| 0x50000004 | CLK_PER_REG | Peripheral divider register |
| 0x5000100C | UART_LCR_REG | Line Control Register |
| 0x50001004 | UART_IER_DLH_REG | Interrupt Enable Register |
| 0x50001000 | UART_RBR_THR_DLL_REG | Receive Buffer Register |
| 0x5000100C | UART_LCR_REG | Line Control Register |
| 0x50001010 | UART_MCR_REG | Modem Control Register |
| 0x50001008 | UART_IIR_FCR_REG | Interrupt Identification Register/FIFO Control Register |
| 0x50001004 | UART_IER_DLH_REG | Interrupt Enable Register |
SetBits16(CLK_PER_REG, UART1_ENABLE, 1); // enable clock for UART 1
SetWord16(UART_LCR_REG, 0x80); // set bit to access DLH and DLL register
SetWord16(UART_IER_DLH_REG,(UART_BAUDRATE_115K2&0xFF>>8));//set high byte
SetWord16(UART_RBR_THR_DLL_REG,UART_BAUDRATE_115K2&0xFF);//set low byte
SetWord16(UART_LCR_REG,UART_DATALENGTH|UART_PARITY|UART_STOPBITS);
SetBits16(UART_MCR_REG, UART_SIRE, 0); // mode 0 for normal , 1 for IRDA
SetWord16(UART_IIR_FCR_REG,1); // enable fifo
SetBits16(UART_IER_DLH_REG,ERBFI_dlh0,0); // IER access, disable interrupt for available data
char uart_receive_byte(void){
#ifndef UART_ENABLED
return 0;
#else
do{
}while((GetWord16(UART_LSR_REG)&0x01)==0); // wait until serial data is ready
return 0xFF&GetWord16(UART_RBR_THR_DLL_REG); // read from receive data buffer
#endif
}
void uart_send_byte(char ch){
#ifndef UART_ENABLED
return ;
#else
while((GetWord16(UART_LSR_REG)&0x20)==0); // read status reg to check if THR is empty
SetWord16(UART_RBR_THR_DLL_REG,(0xFF&ch)); // write to THR register
return;
#endif
}
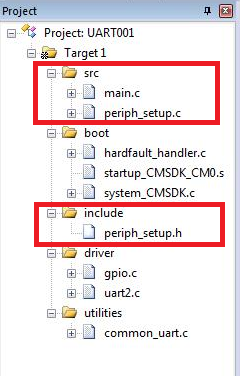
新規作成
main.c, periph_setup.c, periph_setup.hは新規作成する。
Keil μVision上では、
src/main.c src/periph_setup.c include/periph_setup.h
Windows上では、
src/main.c src/periph_setup.c include/periph_setup.h
main.c
nclude <stdio.h>
#include <periph_setup.h>
#include <uart.h>
int main (void)
{
perif_init();
// Init LED
GPIO_ConfigurePin(GPIO_PORT_0, GPIO_PIN_1, OUTPUT, PID_GPIO, false);
// Init UART
GPIO_ConfigurePin(UART_GPIO_PORT, UART_TX_PIN, OUTPUT, PID_UART1_TX, false);
GPIO_ConfigurePin(UART_GPIO_PORT, UART_RX_PIN, INPUT, PID_UART1_RX, false);
uart_initialization();
printf_string("TEST");
}
periph_setup.c
#include <periph_setup.h>
#include <uart.h>
void perif_init() {
// system init
SetWord16(CLK_AMBA_REG, 0x00); // set clocks (hclk and pclk ) 16MHz
SetWord16(SET_FREEZE_REG,FRZ_WDOG); // stop watch dog
SetBits16(SYS_CTRL_REG,PAD_LATCH_EN,1); // open pads
SetBits16(SYS_CTRL_REG,DEBUGGER_ENABLE,1); // open debugger
SetBits16(PMU_CTRL_REG, PERIPH_SLEEP,0); // exit peripheral power down
// Power up peripherals' power domain
SetBits16(PMU_CTRL_REG, PERIPH_SLEEP, 0);
while (!(GetWord16(SYS_STAT_REG) & PER_IS_UP));
}
periph_setup.h
#include <datasheet.h>
#include <gpio.h>
#include <uart.h>
// UART Setting
#define UART_BAUDRATE UART_BAUDRATE_115K2 // Baudrate in bits/s: {9K6, 14K4, 19K2, 28K8, 38K4, 57K6, 115K2}
#define UART_DATALENGTH UART_DATALENGTH_8 // Datalength in bits: {5, 6, 7, 8}
#define UART_PARITY UART_PARITY_NONE // Parity: {UART_PARITY_NONE, UART_PARITY_EVEN, UART_PARITY_ODD}
#define UART_STOPBITS UART_STOPBITS_1 // Stop bits: {UART_STOPBITS_1, UART_STOPBITS_2}
#define UART_FLOWCONTROL UART_FLOWCONTROL_DISABLED // Flow control: {UART_FLOWCONTROL_DISABLED, UART_FLOWCONTROL_ENABLED}
// UART Pin
#define UART_GPIO_PORT GPIO_PORT_0
#define UART_TX_PIN GPIO_PIN_7
#define UART_RX_PIN GPIO_PIN_4
#define UART_ENABLED
void perif_init(void);
void uart_initilize(void);
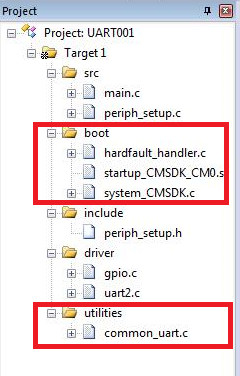
コピーして取り込み
コピー元
DA14580_581_583_SDK_3.0.10.1/peripheral_examples/startup/startup_CMSDK_CM0.s DA14580_581_583_SDK_3.0.10.1/peripheral_examples/startup/system_CMSDK.c DA14580_581_583_SDK_3.0.10.1/dk_apps/src/plf/refip/src/arch/main/ble/hardfault_handler.c DA14580_581_583_SDK_3.0.10.1/peripheral_examples/include/uart.h DA14580_581_583_SDK_3.0.10.1/peripheral_examples/src/uart.c
をWindows上では、
startup/startup_CMSDK_CM0.s startup/system_CMSDK.c startup/hardfault_handler.c include/common_uart.h utilities/common_uart.c
Keil μVision上では、
boot/startup_CMSDK_CM0.s boot/system_CMSDK.c boot/hardfault_handler.c include/common_uart.h utilities/common_uart.c
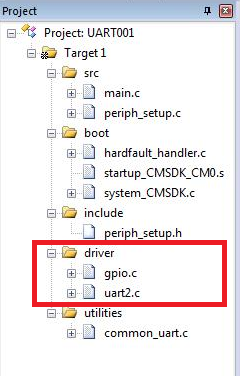
参照で取り込み
参照元
DA14580_581_583_SDK_3.0.10.1/dk_apps/src/plf/refip/src/driver/gpio/gpio.c
Keil μVision上では、
boot/gpio.c
設定
Include path
..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\plf\refip\src\arch\boot\rvds; ..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\plf\refip\src\arch\compiler\rvds; ..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\plf\refip\src\arch\ll\rvds; ..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\dialog\include; ..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\plf\refip\src\arch; ..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\plf\refip\src\driver\reg; ..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\plf\refip\src\driver\uart; ..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\plf\refip\src\driver\gpio; .\include; ..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\plf\refip\src\driver\timer; ..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\plf\refip\src\arch\main\ble; ..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\ip\ble\ll\src\hcic; ..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\modules\rwip\api; ..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\ip\ble\ll\src\rwble; ..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\plf\refip\src\driver\uart; .\utilities