SPIの攻略が必要
各種アドレス番地
製造ID
| 変数 | 値 |
|---|---|
| W25X10CL_MANF_DEV_ID | 0xEF10 |
| W25X20CL_MANF_DEV_ID | 0xEF11 |
ページサイズ
| 変数 | 値 |
|---|---|
| W25X10CL_SIZE | 131072 |
| W25X20CL_SIZE | 262144 |
ページ数
| 変数 | 値 |
|---|---|
| W25X10CL_PAGE | 256 |
| W25X20CL_PAGE | 256 |
SPIセクタサイズ
| 変数 | 値 |
|---|---|
| SPI_SECTOR_SIZE | 4096 |
配線
| pin | SPI配線 |
|---|---|
| P0_0 | CLK |
| P0_3 | CS |
| P0_5 | DO |
| P0_6 | DI |
Manufacture IDの取得
アドレス番地 0x9F にアクセスして取得する。
| アドレス番地 | 定数 | 解説 |
|---|---|---|
| 0x50000004 | CLK_PER_REG | Peripheral divider register |
| 0x50001200 | SPI_CTRL_REG | SPI control register 0 |
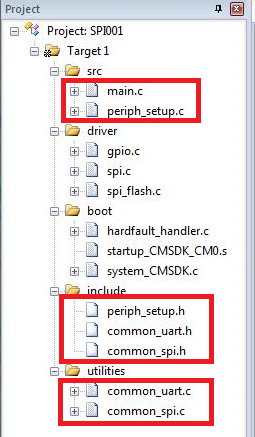
新規作成
common_uart.c, common_uart.h, common_spi.c, common_spi.h, main.c, periph_setup.c, periph_setup.hは新規作成する。
Keil μVision上では、
src\main.c
src\periph_setup.c
include\periph_setup.h
include\common_uart.h
include\common_spi.h
utilities\common_uart.c
utilities\common_spi.c
Windows上では、
src\main.c
src\periph_setup.c
include\periph_setup.h
include\common_uart.h
include\common_spi.h
utilities\common_uart.c
utilities\common_spi.c
src/main.c
#include <stdio.h>
#include <periph_setup.h>
#include <common_uart.h>
#include <common_spi.h>
int main (void)
{
perif_init();
// Init LED
GPIO_ConfigurePin(GPIO_PORT_0, GPIO_PIN_1, OUTPUT, PID_GPIO, false);
// Init UART
GPIO_ConfigurePin(UART_GPIO_PORT, UART_TX_PIN, OUTPUT, PID_UART1_TX, false);
GPIO_ConfigurePin(UART_GPIO_PORT, UART_RX_PIN, INPUT, PID_UART1_RX, false);
uart_initialization();
// Init SPI
spi_initilization();
// Get deviceID
uint16_t devid = get_spi_devid();
printf_string("-----\r\n");
printf_string("manufactor_id:");
printf_byte(devid>>8&0xff);
printf_byte(devid&0xff);
printf_string("\r\n");
// Get Jasmec ID
uint32_t jedec_id = spi_read_flash_jedec_id();
printf_string("SPI flash JEDEC ID is ");
printf_byte((jedec_id>>16)&0xFF);
printf_byte((jedec_id>>8)&0xFF);
printf_byte((jedec_id)&0xFF);
printf_string("\r\n");
// Get Unique ID
uint64_t unique_id = spi_read_flash_unique_id();
printf_string("SPI flash Unique ID Number is ");
printf_byte(((unique_id>>32)>>24)&0xFF);
printf_byte(((unique_id>>32)>>16)&0xFF);
printf_byte(((unique_id>>32)>>8)&0xFF);
printf_byte((unique_id>>32)&0xFF);
printf_byte((unique_id>>24)&0xFF);
printf_byte((unique_id>>16)&0xFF);
printf_byte((unique_id>>8)&0xFF);
printf_byte((unique_id)&0xFF);
printf_string("\r\n");
// Write
spi_cs_low();
spi_cs_high();
spi_flash_chip_erase();
uint8_t wr_data[3];
wr_data[0] = 1;
wr_data[1] = 2;
wr_data[2] = 3;
int pos = 0;
printf_string("\n\r\n\rWrite...");
spi_flash_write_data (wr_data, 0, 3);
printf_string("Wire result. (");
printf_byte(spi_flash_read_status_reg());
printf_string(")\n\r");
int16_t btrd;
uint8_t rd_data[3];
btrd = spi_flash_read_data(rd_data,pos,3);
// Display Results
for (int i=0 ; i<3 ; i++){
printf_byte(rd_data[i]);
printf_string(" ");
}
printf_string("\n\r\n\rBytes Read: 0x");
printf_byte((btrd>>8)&0xFF);
printf_byte((btrd)&0xFF);
printf_string("\n\r");
}
src/periph_setup.c
#include <periph_setup.h>
#include <common_uart.h>
void perif_init() {
// system init
SetWord16(CLK_AMBA_REG, 0x00); // set clocks (hclk and pclk ) 16MHz
SetWord16(SET_FREEZE_REG,FRZ_WDOG); // stop watch dog
SetBits16(SYS_CTRL_REG,PAD_LATCH_EN,1); // open pads
SetBits16(SYS_CTRL_REG,DEBUGGER_ENABLE,1); // open debugger
SetBits16(PMU_CTRL_REG, PERIPH_SLEEP,0); // exit peripheral power down
// Power up peripherals' power domain
SetBits16(PMU_CTRL_REG, PERIPH_SLEEP, 0);
while (!(GetWord16(SYS_STAT_REG) & PER_IS_UP));
}
include/periph_setup.h
#include <datasheet.h>
#include <gpio.h>
#include <common_uart.h>
// UART Setting
#define UART_BAUDRATE UART_BAUDRATE_115K2 // Baudrate in bits/s: {9K6, 14K4, 19K2, 28K8, 38K4, 57K6, 115K2}
#define UART_DATALENGTH UART_DATALENGTH_8 // Datalength in bits: {5, 6, 7, 8}
#define UART_PARITY UART_PARITY_NONE // Parity: {UART_PARITY_NONE, UART_PARITY_EVEN, UART_PARITY_ODD}
#define UART_STOPBITS UART_STOPBITS_1 // Stop bits: {UART_STOPBITS_1, UART_STOPBITS_2}
#define UART_FLOWCONTROL UART_FLOWCONTROL_DISABLED // Flow control: {UART_FLOWCONTROL_DISABLED, UART_FLOWCONTROL_ENABLED}
// UART Pin
#define UART_GPIO_PORT GPIO_PORT_0
#define UART_TX_PIN GPIO_PIN_7
#define UART_RX_PIN GPIO_PIN_4
#define UART_ENABLED
// SPI Flash options
#define SPI_FLASH_SIZE 131072 // SPI Flash memory size in bytes
#define SPI_FLASH_PAGE 256 // SPI Flash memory page size in bytes
//SPI initialization parameters
#define SPI_WORD_MODE SPI_8BIT_MODE // Select SPI bit mode
#define SPI_SMN_MODE SPI_MASTER_MODE // {SPI_MASTER_MODE, SPI_SLAVE_MODE}
#define SPI_POL_MODE SPI_CLK_INIT_HIGH // {SPI_CLK_INIT_LOW, SPI_CLK_INIT_HIGH}
#define SPI_PHA_MODE SPI_PHASE_1 // {SPI_PHA_MODE_0, SPI_PHA_MODE_1}
#define SPI_MINT_EN SPI_NO_MINT // {SPI_MINT_DISABLE, SPI_MINT_ENABLE}
#define SPI_CLK_DIV SPI_XTAL_DIV_2 // Select SPI clock divider between 8, 4, 2 and 14
// SPI Pin
#define SPI_GPIO_PORT GPIO_PORT_0
#define SPI_CLK_PIN GPIO_PIN_0
#define SPI_CS_PIN GPIO_PIN_3
#define SPI_DI_PIN GPIO_PIN_5
#define SPI_DO_PIN GPIO_PIN_6
void perif_init(void);
include/common_uart.h
/**
****************************************************************************************
*
* @file uart.h
*
* @brief uart initialization and print functions header file.
*
* Copyright (C) 2012. Dialog Semiconductor Ltd, unpublished work. This computer
* program includes Confidential, Proprietary Information and is a Trade Secret of
* Dialog Semiconductor Ltd. All use, disclosure, and/or reproduction is prohibited
* unless authorized in writing. All Rights Reserved.
*
* <bluetooth.support@diasemi.com> and contributors.
*
****************************************************************************************
*/
#include <stdint.h>
#ifndef UART_H_INCLUDED
#define UART_H_INCLUDED
void uart_initialization(void);
void uart_test(void);
char uart_receive_byte(void);
void uart_send_byte(char ch);
void printf_byte(int a);
void printf_string(char * str);
void printf_byte_dec(int a);
/*
* ENUMERATION DEFINITIONS
*****************************************************************************************
*/
/// Baudrates
enum{
/// Divider for 115200 bits/s
UART_BAUDRATE_115K2 = 9,
/// Divider for 57600 bits/s
UART_BAUDRATE_57K6 = 17,
/// Divider for 38400 bits/s
UART_BAUDRATE_38K4 = 26,
/// Divider for 28800 bits/s
UART_BAUDRATE_28K8 = 35,
/// Divider for 19200 bits/s
UART_BAUDRATE_19K2 = 52,
/// Divider for 14400 bits/s
UART_BAUDRATE_14K4 = 69,
/// Divider for 9600 bits/s
UART_BAUDRATE_9K6 = 104,
/// Divider for 2400 bits/s
UART_BAUDRATE_2K4 = 417,
};
/// Character format
enum
{
/// data length 5 bits
UART_DATALENGTH_5 = 0,
/// data length 6 bits
UART_DATALENGTH_6 = 1,
/// data length 7 bits
UART_DATALENGTH_7 = 2,
/// data length 8 bits
UART_DATALENGTH_8 = 3
};
/// Parity
enum
{
/// no parity
UART_PARITY_NONE = 0,
/// even parity
UART_PARITYBIT_EVEN = 1,
/// odd parity
UART_PARITYBIT_ODD = 3,
};
/// Stop bit
enum
{
/// stop bit 1
UART_STOPBITS_1 = 0,
/* Note: The number of stop bits is 1.5 if a
* character format with 5 bit is chosen */
/// stop bit 2
UART_STOPBITS_2 = 1
};
/// Flow control
enum
{
/// disabled auto flow control
UART_FLOWCONTROL_DISABLED,
/// enabled auto flow control
UART_FLOWCONTROL_ENABLED,
};
/*
* FUNCTION DECLARATIONS
****************************************************************************************
*/
/**
****************************************************************************************
* @brief prints a (16-bit) half-word in hex format using printf_byte
* @param aHalfWord The 16-bit half-word to print
*
****************************************************************************************
*/
void print_hword(uint16_t aHalfWord);
/**
****************************************************************************************
* @brief prints a (32-bit) word in hex format using printf_byte
* @param aWord The 32-bit word to print
*
****************************************************************************************
*/
void print_word(uint32_t aWord);
#endif
include/common_spi.h
void uart_spi(void);
int get_spi_devid(void);
utilities/common_uart.c
/**
****************************************************************************************
*
* @file uart.c
*
* @brief (Do not use for your designs) - (legacy) uart initialization & print functions
* Please, refer to the Peripheral Drivers documentation for the current uart.c driver
*
* Copyright (C) 2012. Dialog Semiconductor Ltd, unpublished work. This computer
* program includes Confidential, Proprietary Information and is a Trade Secret of
* Dialog Semiconductor Ltd. All use, disclosure, and/or reproduction is prohibited
* unless authorized in writing. All Rights Reserved.
*
* <bluetooth.support@diasemi.com> and contributors.
*
****************************************************************************************
*/
#include "global_io.h"
#include "gpio.h"
#include <core_cm0.h>
#include "common_uart.h"
#include "periph_setup.h"
void uart_initialization(void)
{
SetBits16(CLK_PER_REG, UART1_ENABLE, 1); // enable clock for UART 1
SetWord16(UART_LCR_REG, 0x80); // set bit to access DLH and DLL register
SetWord16(UART_IER_DLH_REG,(UART_BAUDRATE_115K2&0xFF>>8));//set high byte
SetWord16(UART_RBR_THR_DLL_REG,UART_BAUDRATE_115K2&0xFF);//set low byte
SetWord16(UART_LCR_REG,UART_DATALENGTH|UART_PARITY|UART_STOPBITS);
SetBits16(UART_MCR_REG, UART_SIRE, 0); // mode 0 for normal , 1 for IRDA
SetWord16(UART_IIR_FCR_REG,1); // enable fifo
SetBits16(UART_IER_DLH_REG,ERBFI_dlh0,0); // IER access, disable interrupt for available data
}
void uart_test(void){
printf_string("\n\r\n\r*************");
printf_string("\n\r* UART TEST *\n\r");
printf_string("*************\n\r");
printf_string("\n\rHello World! == UART printf_string() ==.\n\r");
}
char uart_receive_byte(void){
#ifndef UART_ENABLED
return 0;
#else
do{
}while((GetWord16(UART_LSR_REG)&0x01)==0); // wait until serial data is ready
return 0xFF&GetWord16(UART_RBR_THR_DLL_REG); // read from receive data buffer
#endif
}
void uart_send_byte(char ch){
#ifndef UART_ENABLED
return ;
#else
while((GetWord16(UART_LSR_REG)&0x20)==0); // read status reg to check if THR is empty
SetWord16(UART_RBR_THR_DLL_REG,(0xFF&ch)); // write to THR register
return;
#endif
}
void printf_string(char * str){
#ifndef UART_ENABLED
return ;
#else
while(*str!=0){ // while not reach the last string character
uart_send_byte(*str); // send next string character
str++;
}
#endif
}
void printf_byte(int a){ // print a Byte in hex format
#ifndef UART_ENABLED
return ;
#else
char b;
b=((0xF0&a)>>4);
b+= (b<10)?48:55;
uart_send_byte(b);
b=(0xF&a);
b+= (b<10)?48:55;
uart_send_byte(b);
#endif
}
/* reverse: reverse string s in place */
void reverse(char s[])
{
int i, j;
char c;
for (i = 0, j = strlen(s)-1; i<j; i++, j--) {
c = s[i];
s[i] = s[j];
s[j] = c;
}
}
/* itoa: convert n to characters in s */
void itoa(int n, char s[])
{
int i, sign;
if ((sign = n) < 0) /* record sign */
n = -n; /* make n positive */
i = 0;
do { /* generate digits in reverse order */
s[i++] = n % 10 + '0'; /* get next digit */
} while ((n /= 10) > 0); /* delete it */
if (sign < 0)
s[i++] = '-';
s[i] = '\0';
reverse(s);
}
void printf_byte_dec(int a){ // print a Byte in decimal format
char temp_buf[4];
#ifndef UART_ENABLED
return ;
#else
if ( a>255 )
return;
itoa( a, temp_buf );
uart_send_byte(temp_buf[0]);
uart_send_byte(temp_buf[1]);
uart_send_byte(temp_buf[2]);
#endif
}
/**
****************************************************************************************
* @brief prints a (16-bit) half-word in hex format using printf_byte
* @param aHalfWord The 16-bit half-word to print
*
****************************************************************************************
*/
void print_hword(uint16_t aHalfWord)
{
printf_byte((aHalfWord >> 8)& 0xFF);
printf_byte((aHalfWord)& 0xFF);
}
/**
****************************************************************************************
* @brief prints a (32-bit) word in hex format using printf_byte
* @param aHalfWord The 32-bit word to print
*
****************************************************************************************
*/
void print_word(uint32_t aWord)
{
printf_byte((aWord >> 24)& 0xFF);
printf_byte((aWord >> 16)& 0xFF);
printf_byte((aWord >> 8)& 0xFF);
printf_byte((aWord)& 0xFF);
}
utilities/common_spi.c
#include "common_spi.h"
#include <spi_flash.h>
#include "periph_setup.h"
SPI_Pad_t spi_FLASH_CS_Pad2;
int8_t detected_spi_flash_device_index2;
void spi_initilization(void){
// Init SPI
GPIO_ConfigurePin( SPI_GPIO_PORT, SPI_CS_PIN, OUTPUT, PID_SPI_EN, true );
GPIO_ConfigurePin( SPI_GPIO_PORT, SPI_CLK_PIN, OUTPUT, PID_SPI_CLK, false );
GPIO_ConfigurePin( SPI_GPIO_PORT, SPI_DO_PIN, OUTPUT, PID_SPI_DO, false );
GPIO_ConfigurePin( SPI_GPIO_PORT, SPI_DI_PIN, INPUT, PID_SPI_DI, false );
// Enable FLASH and SPI
spi_FLASH_CS_Pad2.pin = SPI_CS_PIN;
spi_FLASH_CS_Pad2.port = SPI_GPIO_PORT;
// Enable SPI & SPI FLASH
spi_init(&spi_FLASH_CS_Pad2, SPI_MODE_8BIT, SPI_ROLE_MASTER, SPI_CLK_IDLE_POL_LOW, SPI_PHA_MODE_0, SPI_MINT_DISABLE, SPI_XTAL_DIV_8); spi_flash_release_from_power_down();
detected_spi_flash_device_index2 = spi_flash_auto_detect();
if (detected_spi_flash_device_index2 == SPI_FLASH_AUTO_DETECT_NOT_DETECTED)
{
// The device was not identified.
// The default parameters are used (SPI_FLASH_SIZE, SPI_FLASH_PAGE)
// Alternatively, an error can be asserted here.
spi_flash_init(SPI_FLASH_SIZE, SPI_FLASH_PAGE);
}
}
int get_spi_devid(void){
// spi_flash_chip_erase();
// Read SPI Flash Manufacturer/Device ID
uint16_t man_dev_id = 0;
man_dev_id = spi_read_flash_memory_man_and_dev_id();
return man_dev_id;
}
参照で取り込み

コピーで取り込み
include path
..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\plf\refip\src\arch\boot\rvds;..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\plf\refip\src\arch\compiler\rvds;..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\plf\refip\src\arch\ll\rvds;..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\dialog\include;..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\plf\refip\src\arch;..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\plf\refip\src\driver\reg;..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\plf\refip\src\driver\gpio;.\include;..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\plf\refip\src\driver\timer;..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\plf\refip\src\arch\main\ble;..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\ip\ble\ll\src\hcic;..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\modules\rwip\api;..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\ip\ble\ll\src\rwble;..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\plf\refip\src\driver\uart;.\utilities;..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\plf\refip\src\driver\spi;..\DA14580_581_583_SDK_3.0.10.1\dk_apps\src\plf\refip\src\driver\spi_flash