モータードライバ(DCモーター)
モータードライバ
モータードライバとは、外部電源で駆動しているモーターの電圧制御を行うことができるようになる装置です。 車などで行うと前進、後退、停止などの動作を行うことができます。
モータードライバにはいくつか種類がありますが、今回はDCモーター用のものを使用します。
モータードライバ TA7291P
http://akizukidenshi.com/catalog/g/gI-02001/
モータードライバのピンについて説明します。
文字が書いてある面を正面に、左から順に番号が振ってあります。
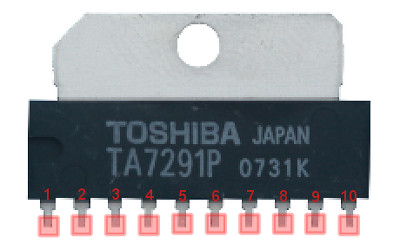
| No | 内容 | 接続先 |
|---|---|---|
| 1 | 電源(GND) | GND、外部電源− |
| 2 | OUT1 | モーター用 |
| 3 | 使用しない | 接続無し |
| 4 | 制御電源(モーターの速度) | 3番ピン(PWM) |
| 5 | IN1(信号1) | 2番ピン |
| 6 | IN2(信号2) | 1番ピン |
| 7 | 電源(+) | 5v |
| 8 | 出力側電源 | 外部電源+ |
| 9 | 使用しない | 接続無し |
| 10 | OUT2 | モーター用 |
5番と6番の出力の組み合わせでモーターの動きを制御します。
| 5番ピン(IN1) | 6番ピン(IN2) | モーターの動き |
|---|---|---|
| LOW | LOW | 静止 |
| HIGH | LOW | 前進 |
| LOW | HIGH | 後退 |
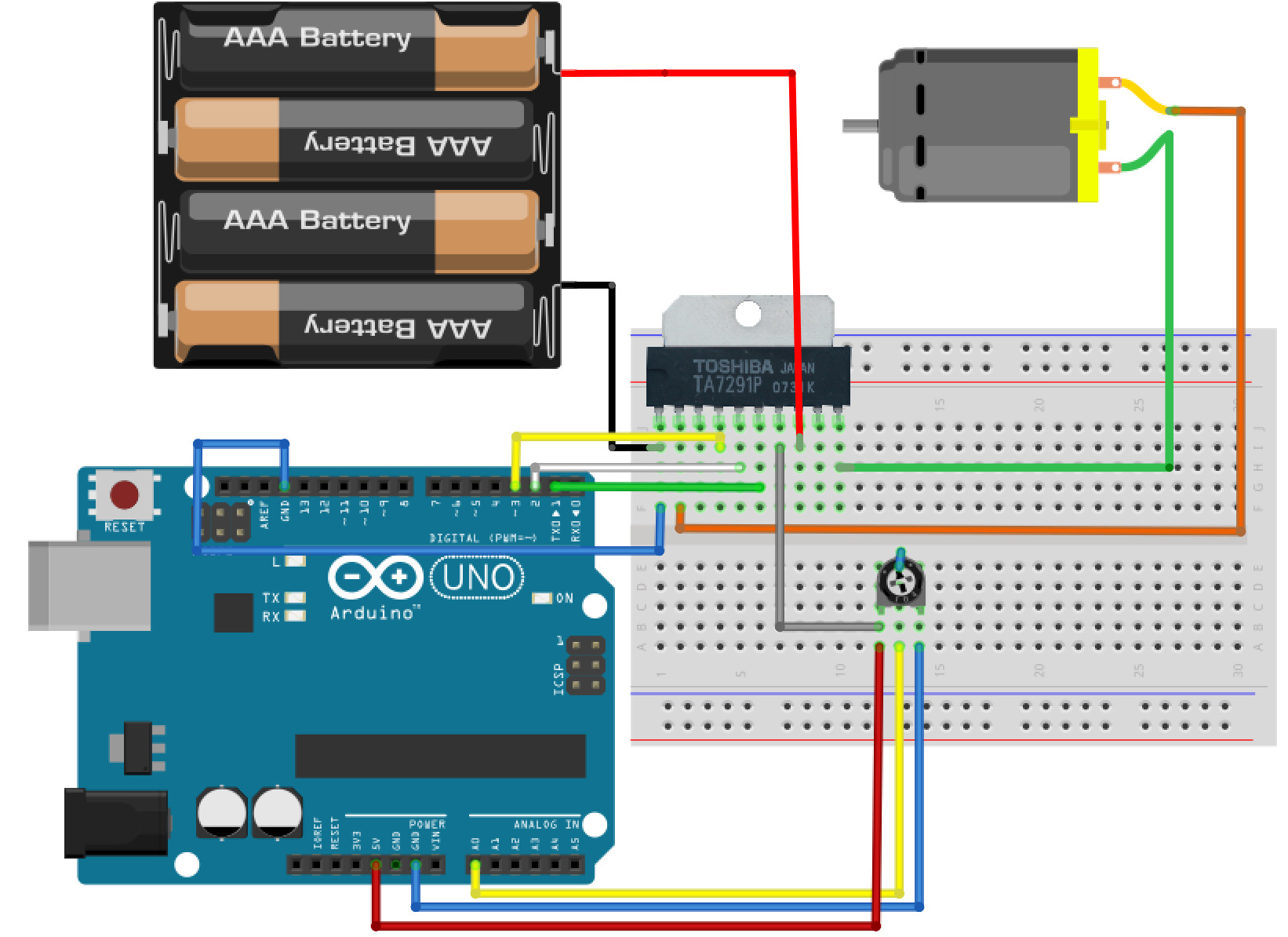
回路
今回は外部電源(電池)を使用するため、プラスマイナスや、ショートに注意しましょう。
スケッチ
最初に前進の動作を行います。
電池を入れる前にスケッチ書き込みを行い、一旦PCから外してから電池をセットし、もう一度接続して確認しましょう。
void setup(){
pinMode(1,OUTPUT); //信号用ピン 6番ピン
pinMode(2,OUTPUT); //信号用ピン 5番ピン
}
void loop(){
//アナログ入力:0番ピンの値を4で割る
int val = analogRead(0) / 4; //0~255の値にする
// 5番ピンをHIGH, 6番ピンをLOW
digitalWrite(1,LOW);
digitalWrite(2,HIGH);
//valが大きいほど出力値も大きくなる
analogWrite( 3 , val ); //出力値:1~255
}
確認できましたら、今度は逆転をやってみましょう。
void setup(){
pinMode(1,OUTPUT); //信号用ピン 6番ピン
pinMode(2,OUTPUT); //信号用ピン 5番ピン
}
void loop(){
//アナログ入力:0番ピンの値を4で割る
int val = analogRead(0) / 4; //0~255の値にする
// 5番ピンをLOW, 6番ピンをHIGH
digitalWrite(1,HIGH);
digitalWrite(2,LOW);
//valが大きいほど出力値も大きくなる
analogWrite( 3 , val ); //出力値:1~255
}
可変抵抗による前進、停止、後退の制御
ここまでできましたら、可変抵抗の値によって前進、後退、停止するスケッチを書いてみましょう。
void setup(){
pinMode(1,OUTPUT); //信号用ピン 6番ピン
pinMode(2,OUTPUT); //信号用ピン 5番ピン
}
void loop(){
//アナログ入力:0番ピンの値を2で割る
int val=analogRead(0)/2; //0~511の値にする
//静止/前進/後退の状態に分けてプログラムする
if(val>=250 && val<=260){
//250から260の間は静止
digitalWrite(1,LOW);
digitalWrite(2,LOW);
}else if(val>260){
//260から511の場合は前進
digitalWrite(1,HIGH);
digitalWrite(2,LOW);
//valが大きいほど出力値も大きくなる
analogWrite(3,val-256);
}else{
//0から249の場合は後退
digitalWrite(1,LOW);
digitalWrite(2,HIGH);
//valが小さいほど出力値は大きくなる
analogWrite(3,255-val); //出力値:1~255
}
}
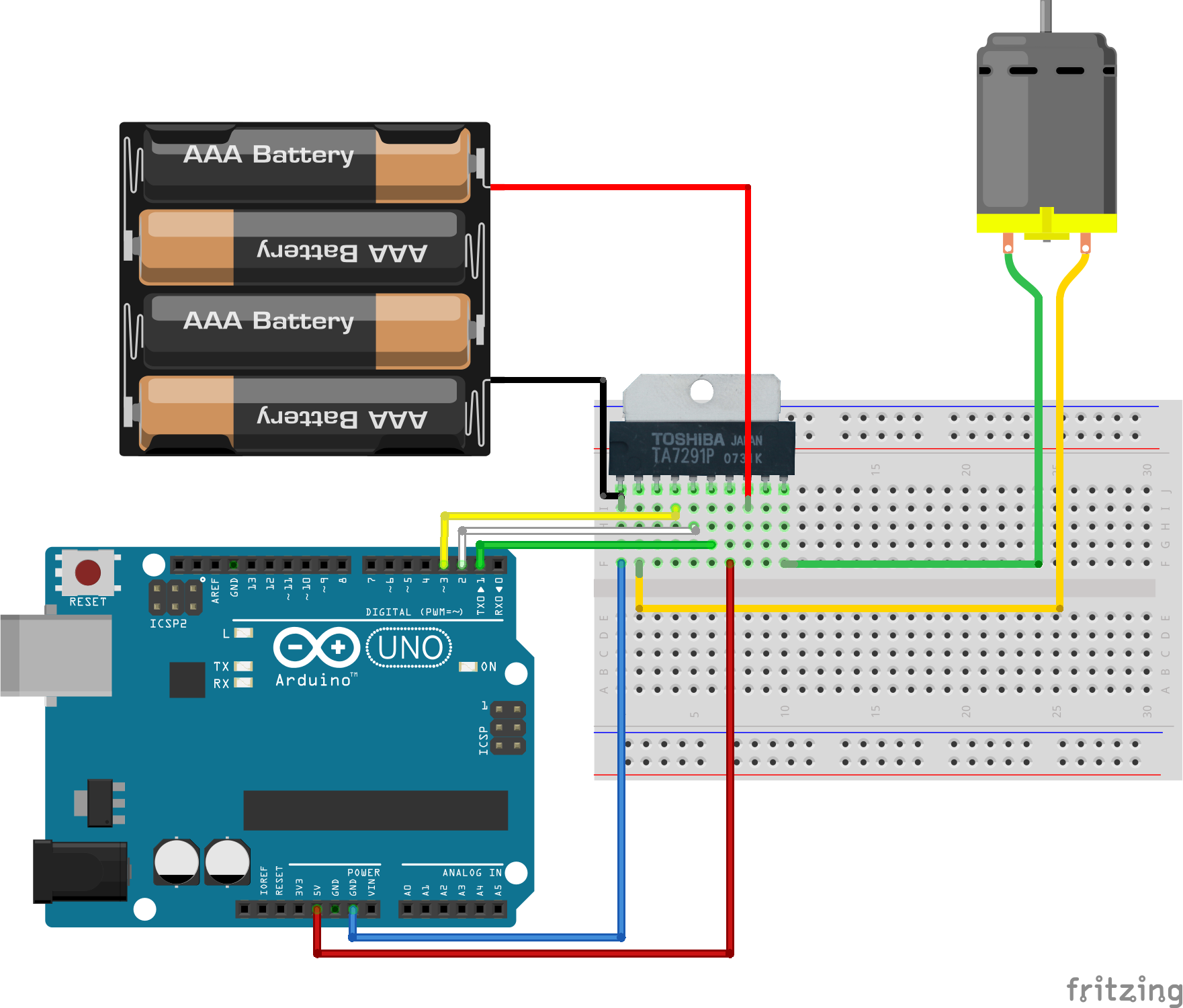
可変抵抗なし回路
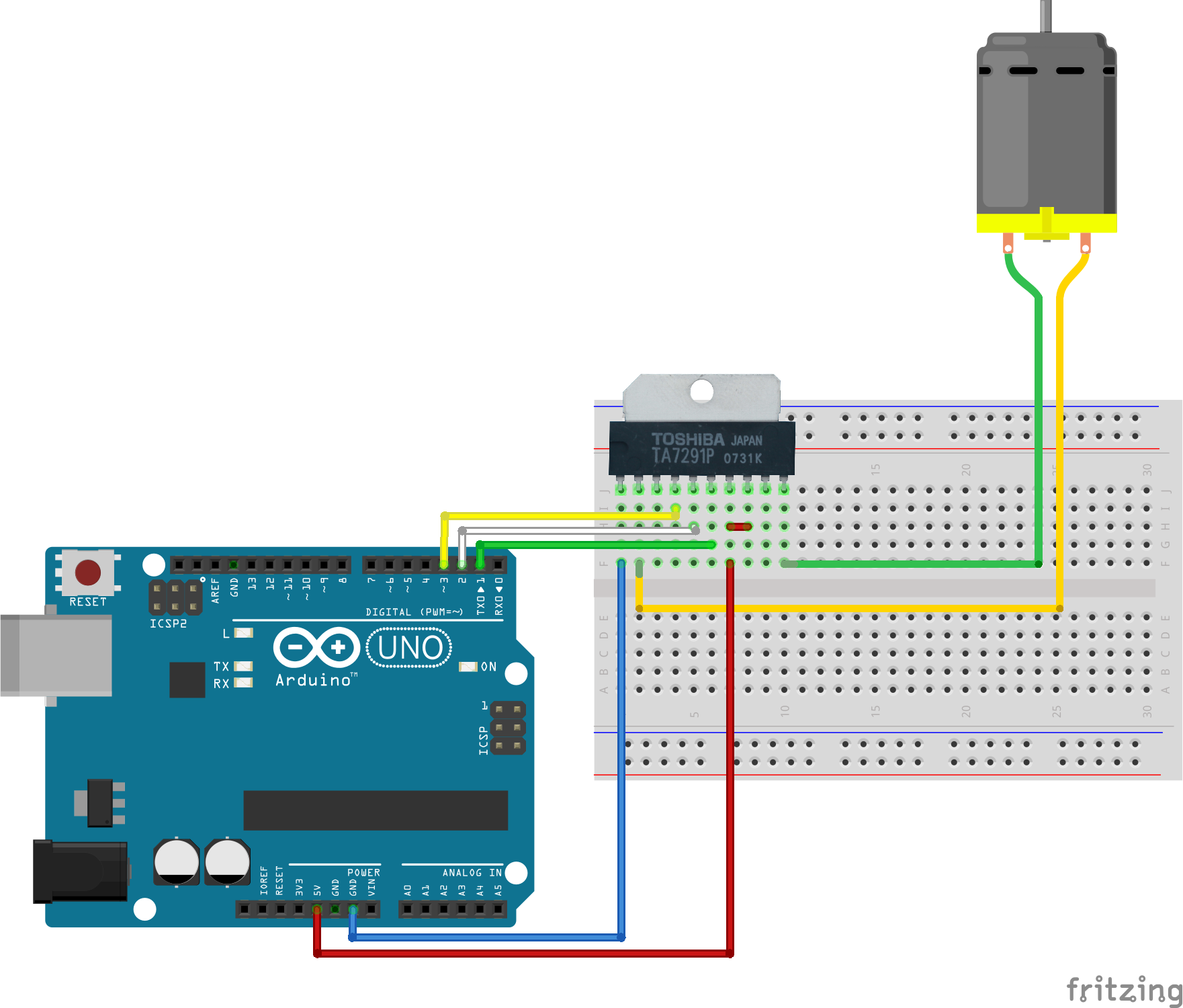
可変抵抗、電池なし回路
可変抵抗なし回路のスケッチ(電池なしもOK)
void setup(){
pinMode(1,OUTPUT); //信号用ピン 6番ピン
pinMode(2,OUTPUT); //信号用ピン 5番ピン
}
void loop(){
//モーターの強さ指定
int val = 255; //0~255の値にする
// 信号1をHIGH, 信号2をLOW
digitalWrite(1,HIGH);
digitalWrite(2,LOW);
//valが大きいほど出力値も大きくなる
analogWrite( 3 , val ); //出力値:1~255
}